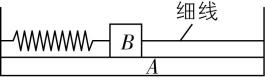
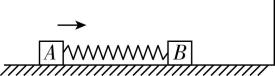
12.如图,三块厚度相同、质量相等的木板 $ A $ 、 $ B $ 、 $ C $ (上表面均粗糙)并排静止在光滑水平面上,尺寸不计的智能机器人静止于 $ A $ 木板左端.已知三块木板质量均为 $ 2.0\mathrm{k}\mathrm{g} $ , $ A $ 木板长度为 $ 2.0\mathrm{m} $ ,机器人质量为 $ 6.0\mathrm{k}\mathrm{g} $ ,重力加速度 $ g $ 取 $ 10\mathrm{m}/{\mathrm{s}}^{2} $ ,忽略空气阻力.
(2) 机器人走到 $ A $ 木板右端相对木板静止后,以做功最少的方式从 $ A $ 木板右端跳到 $ B $ 木板左端,求起跳过程机器人做的功,及跳离瞬间的速度方向与水平方向夹角的正切值.
(3) 若机器人以做功最少的方式跳到 $ B $ 木板左端后立刻与 $ B $ 木板相对静止,随即相对 $ B $ 木板连续不停地3次等间距跳到 $ B $ 木板右端,此时 $ B $ 木板恰好追上 $ A $ 木板.求该时刻 $ A $ 、 $ C $ 两木板间距与 $ B $ 木板长度的关系.
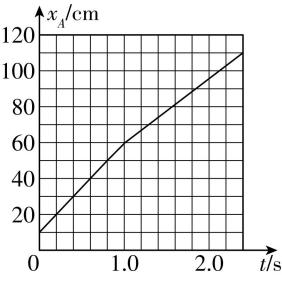
解析:(1) 机器人从 $ A $ 木板左端走到 $ A $ 木板右端的过程中,机器人与 $ A $ 木板组成的系统动量守恒, $ A $ 木板向左运动, $ B $ 、 $ C $ 木板静止,设机器人的质量为 $ M $ ,三个木板的质量均为 $ m $ ,由动量守恒定律得 $ Mv=m{v}_{A} $ ,
设所用时间为 $ t $ ,则有 $ Mvt=m{v}_{A}t $ ,即 $ Mx=m{x}_{A} $ ,又 $ x+{x}_{A}={L}_{A} $ ,
联立解得 $ {x}_{A}=1.5\mathrm{m} $ ,
则 $ A $ 、 $ B $ 木板间的水平距离为 $ 1.5\mathrm{m} $ .
(2) 设机器人起跳的速度大小为 $ {v}_{0} $ ,速度方向与水平方向的夹角为 $ \theta $ ,机器人从 $ A $ 木板右端跳到 $ B $ 木板左端的时间为 $ {t}_{1} $ ,由斜抛运动规律得 $ {v}_{0} \cos \theta \cdot {t}_{1}={x}_{A} $ ,
$ {v}_{0} \sin \theta =g\cdot \dfrac{{t}_{1}}{2} $ ,
联立解得 $ {v}_{0}^{2}=\dfrac{15}{2 \sin \theta \cos \theta } $ ,
机器人跳离 $ A $ 木板的过程中,系统水平方向动量守恒,
由动量守恒定律得 $ M{v}_{0} \cos \theta =mv{\prime }_{A} $ ,
由功能关系得,机器人做的功为 $ W=\dfrac{1}{2}M{v}_{0}^{2}+\dfrac{1}{2}mv{\prime }_{A}^{2} $ ,
联立可得 $ W=\dfrac{1+3{ \cos }^{2}\theta }{2 \sin \theta \cos \theta }×45\mathrm{J}=\dfrac{{ \sin }^{2}\theta +4{ \cos }^{2}\theta }{2 \sin \theta \cos \theta }×45\mathrm{J}=(\dfrac{1}{2} \tan \theta +\dfrac{2}{ \tan \theta })×45\mathrm{J} $ ,
由数学知识可知,当且仅当 $ \dfrac{1}{2} \tan \theta =\dfrac{2}{ \tan \theta } $ 时,即 $ \tan \theta =2 $ 时,机器人做功最少,代入可得 $ {W}_{ \min }=90\mathrm{J} $ .
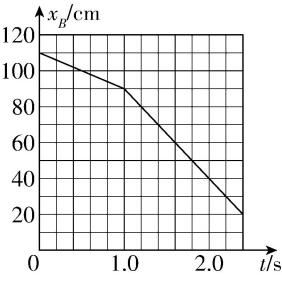
(3) 由 $ \tan \theta =2 $ ,可计算出 $ {v}_{0} \cos \theta =\dfrac{\sqrt{15}}{2}\mathrm{m}/\mathrm{s} $ ,由 $ M{v}_{0} \cos \theta =mv{\prime }_{A} $ 解得 $ v{\prime }_{A}=\dfrac{3}{2}\sqrt{15}\mathrm{m}/\mathrm{s} $ ,此后 $ A $ 木板以此速度向左做匀速直线运动.机器人跳离 $ A $ 木板到与 $ B $ 木板相对静止的过程中,机器人与 $ B $ 、 $ C $ 木板组成的系统在水平方向上动量守恒,由动量守恒定律得 $ M{v}_{0} \cos \theta =(M+2m){v}_{B} $ ,
此过程中 $ A $ 木板向左运动的距离 $ x{\prime }_{A}=v{\prime }_{A}{t}_{1} $ ,
代入数据得 $ x{\prime }_{A}=4.5\mathrm{m} $ ,
机器人连续三次等间距跳到 $ B $ 木板右端,整个过程机器人和 $ B $ 木板组成的系统水平方向动量守恒,设每次跳起后机器人的水平速度大小为 $ {v}_{1} $ , $ B $ 木板的速度大小为 $ {v}_{B1} $ ,机器人每次跳跃的时间为 $ \mathrm{\Delta }t $ ,
以向右为正方向,由动量守恒定律得
$ (M+m){v}_{B}=M{v}_{1}-m{v}_{B1} $ ,
每次跳跃,机器人和 $ B $ 木板的相对位移为 $ \dfrac{{L}_{B}}{3} $ ,则有
$ \dfrac{{L}_{B}}{3}=({v}_{1}+{v}_{B1})\mathrm{\Delta }t $ ,
机器人到达 $ B $ 木板右端时, $ B $ 木板恰好追上 $ A $ 木板,从机器人跳上 $ B $ 左端到跳到 $ B $ 的右端的过程中, $ A $ 、 $ B $ 木板的位移之差为 $ \mathrm{\Delta }x={x}_{A}+x{\prime }_{A}=6\mathrm{m} $ ,则有 $ ({v}_{B1}-v{\prime }_{A})×3\mathrm{\Delta }t=\mathrm{\Delta }x $ ,
联立解得 $ \mathrm{\Delta }t=\dfrac{{L}_{B}}{4(v{\prime }_{A}+{v}_{B})}-\dfrac{\mathrm{\Delta }x}{3(v{\prime }_{A}+{v}_{B})} $ ,
$ A $ 、 $ C $ 两木板的间距为 $ {x}_{AC}=(v{\prime }_{A}+{v}_{C})×3\mathrm{\Delta }t+\mathrm{\Delta }x+{L}_{B} $ , $ {v}_{C}={v}_{B} $ ,
整理得 $ {x}_{AC}=\dfrac{7}{4}{L}_{B} $ .
 (多选)
(多选)
 (多选)
(多选)