第二章素养检测
一、刷速度
1.如图所示,一弹簧振子做简谐运动,下列说法正确的是( )
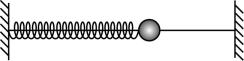
A.小球每次速度达到最大时,位移不相同
B.若位移为负值,则回复力方向一定沿负方向
C.小球通过平衡位置时,动能最小,势能最大
D.小球每次通过同一位置时,其位移一定相同,但速度不一定相同
答案:D
解析:小球通过平衡位置时,速度最大,位移为零, $ \mathrm{A} $ 错误;简谐运动的回复力 $ F=-kx $ ,故回复力与位移反向,若位移为负值,则回复力方向沿正方向, $ \mathrm{B} $ 错误;小球通过平衡位置时,速度最大,动能最大,势能最小, $ \mathrm{C} $ 错误;小球每次通过同一位置时,位移一定相同,速度大小相等,但速度方向可能相同,也可能相反,故 $ \mathrm{D} $ 正确.
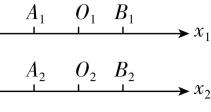
2.如图所示,甲质点在 $ {x}_{1} $ 轴上做简谐运动, $ {O}_{1} $ 为其平衡位置, $ {A}_{1} $ 、 $ {B}_{1} $ 为其所能达到的最远处.乙质点沿 $ {x}_{2} $ 轴从 $ {A}_{2} $ 点开始做初速度为零的匀加速直线运动.已知 $ {A}_{1}{O}_{1}={A}_{2}{O}_{2} $ ,甲、乙两质点分别经过 $ {O}_{1} $ 、 $ {O}_{2} $ 的速率相等,设甲质点从 $ {A}_{1} $ 运动到 $ {O}_{1} $ 的时间为 $ {t}_{1} $ ,乙质点从 $ {A}_{2} $ 运动到 $ {O}_{2} $ 的时间为 $ {t}_{2} $ ,则( )
A. $ {t}_{1}={t}_{2} $
B. $ {t}_{1} > {t}_{2} $
C. $ {t}_{1} < {t}_{2} $
D.无法比较 $ {t}_{1} $ 、 $ {t}_{2} $
答案:C
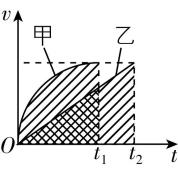
解析:已知 $ {A}_{1}{O}_{1}={A}_{2}{O}_{2} $ ,甲、乙两质点分别经过 $ {O}_{1} $ 、 $ {O}_{2} $ 的速率相等,结合题意,作出甲质点从 $ {A}_{1} $ 到 $ {O}_{1} $ 与乙质点从 $ {A}_{2} $ 到 $ {O}_{2} $ 过程的 $ v-t $ 图像,如图所示,由于 $ v-t $ 图线与 $ t $ 轴所围图形的面积表示位移,则甲、乙的 $ v-t $ 图线与 $ t $ 轴所围图形面积相等,可得 $ {t}_{1} < {t}_{2} $ ,故选 $ \mathrm{C} $ .
3.振动送料机是工业中常用的物料输送设备,其简化模型如图所示:水平料槽通过两根轻弹簧与固定支架连接,料槽下方安装有电动偏心轮,偏心轮转动时给料槽提供水平周期性驱动力.已知料槽的固有频率 $ {f}_{固} $ 与总质量 $ m $ 成反比(质量越大,固有频率越小).某次调试中,料槽空载时固有频率 $ {f}_{固}=1.0\mathrm{H}\mathrm{z} $ ,偏心轮转速调至 $ n=120\mathrm{r}/ \min $ 时料槽振幅较小.忽略弹簧质量及摩擦阻力,则下列说法正确的是( )

A.当前驱动力频率为 $ 1.0\mathrm{H}\mathrm{z} $
B.仅向料槽内添加物料(增大总质量),料槽振幅增大
C.仅降低偏心轮转速至 $ 60\mathrm{r}/ \min $ ,料槽振幅增大
D.仅降低偏心轮转速至 $ 60\mathrm{r}/ \min $ ,料槽振幅减小
答案:C
解析:偏心轮转速调至 $ n=120\mathrm{r}/ \min =2.0\mathrm{r}/\mathrm{s} $ 时,驱动力频率为 $ f=2.0\mathrm{H}\mathrm{z} $ ,故 $ \mathrm{A} $ 错误;仅向料槽内添加物料(增大总质量),固有频率变小,驱动力频率和固有频率相差更大,则料槽振幅减小,故 $ \mathrm{B} $ 错误;仅降低偏心轮转速至 $ n^\prime =60\mathrm{r}/ \min =1.0\mathrm{r}/\mathrm{s} $ ,驱动力频率为 $ f^\prime =1.0\mathrm{H}\mathrm{z} $ ,等于固有频率,此时发生共振,料槽振幅增大,故 $ \mathrm{C} $ 正确, $ \mathrm{D} $ 错误.
4.已知弹簧振子的振动周期 $ T=2\mathrm{\pi }\sqrt{\dfrac{m}{k}} $ ,总机械能与振幅 $ A $ 的平方成正比,即 $ E=\dfrac{1}{2}k{A}^{2} $ , $ k $ 为弹簧的劲度系数, $ m $ 为振子的质量.如图所示,一劲度系数为 $ k $ 的轻弹簧一端固定,另一端连接着质量为 $ m $ 的物块,物块在光滑水平面上做往复运动.当物块运动到最大位移为 $ A $ 的时刻,把另一质量也为 $ m $ 的物块轻放在其上,两个物块恰好始终一起振动.设最大静摩擦力等于滑动摩擦力,重力加速度为 $ g $ .放上质量也为 $ m $ 的物块后,下列说法正确的是( )
A.两物块之间的动摩擦因数为 $ \dfrac{kA}{2mg} $
B.物块振动周期变为原来的2倍
C.物块经过平衡位置时的速度大小为 $ \dfrac{1}{2}\sqrt{\dfrac{k{A}^{2}}{m}} $
D.系统的振幅减小
答案:A
解析:对整体受力分析可知,弹簧弹力提供回复力,当位移最大时,根据牛顿第二定律得 $ kA=2ma $ ,上面物块的回复力由静摩擦力提供,当位移最大时,最大静摩擦力满足 $ \mu mg=ma $ ,联立解得动摩擦因数为 $ \mu =\dfrac{kA}{2mg} $ ,故 $ \mathrm{A} $ 正确;根据弹簧振子的振动周期公式可知,当振子质量变为原来的2倍时,周期变为原来的 $ \sqrt{2} $ 倍,故 $ \mathrm{B} $ 错误;由于上方物块是处于最大位移处时放上去的,而此时速度为零,总机械能为弹簧的弹性势能,在弹性势能和动能的转化过程中,只有弹簧弹力做功,所以系统的总机械能守恒,则振幅不变,故 $ \mathrm{D} $ 错误;系统的总机械能为 $ E=\dfrac{1}{2}k{A}^{2} $ ,根据机械能守恒定律得位于平衡位置时两物块具有最大动能,则有 $ \dfrac{1}{2}×2m{v}_{\mathrm{m}}^{2}=E $ ,解得 $ {v}_{\mathrm{m}}=\sqrt{\dfrac{k{A}^{2}}{2m}} $ ,故 $ \mathrm{C} $ 错误.
5.如图所示,匀强电场方向与水平方向成 $ {60}^{\circ } $ 角,场强 $ E=2.0×{10}^{5}\mathrm{N}/\mathrm{C} $ .质量 $ m=0.4\mathrm{k}\mathrm{g} $ 、带电荷量 $ q=2.0×{10}^{-6}\mathrm{C} $ 的小球与一根轻质、绝缘材料制成的弹簧的右端相连,弹簧的劲度系数 $ k=10\mathrm{N}/\mathrm{m} $ ,小球穿在水平光滑绝缘细杆上,在 $ BC $ 间以 $ O $ 点为平衡位置做简谐运动,已知小球做简谐运动的最大速度为 $ 0.3\mathrm{m}/\mathrm{s} $ ,可以用 $ F-x $ 图像与横轴围成的“面积”代表力 $ F $ 所做的功.下列说法正确的是( )
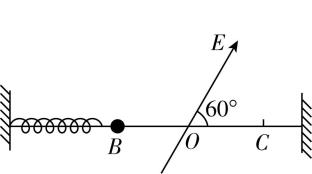
A.小球到达 $ O $ 点时,弹簧的形变量为 $ 4\mathrm{c}\mathrm{m} $
B.小球做简谐运动的振幅为 $ 6\mathrm{c}\mathrm{m} $
C.小球到达 $ B $ 点时的瞬时加速度为 $ 0.5\mathrm{m}/{\mathrm{s}}^{2} $ ,方向水平向右
D.运动过程中由小球和弹簧构成的系统机械能守恒
答案:B
解析: $ O $ 点为平衡位置,小球受到的合力为零,由 $ qE \cos {60}^{\circ }=k{x}_{0} $ ,解得 $ {x}_{0}=2\mathrm{c}\mathrm{m} $ ,故 $ \mathrm{A} $ 错误;小球从 $ B $ 点到 $ O $ 点的过程,由能量守恒定律有 $ \dfrac{1}{2}k{\left(A-{x}_{0}\right) ^ {2}}+qEA \cos {60}^{\circ }=\dfrac{1}{2}m{v}_{\mathrm{m}}^{2}+\dfrac{1}{2}k{x}_{0}^{2} $ ,解得 $ A=6\mathrm{c}\mathrm{m} $ ,故 $ \mathrm{B} $ 正确;在 $ B $ 点时,由牛顿第二定律有 $ k(A-{x}_{0})+qE \cos {60}^{\circ }=kA=ma $ ,代入数据解得 $ a=1.5\mathrm{m}/{\mathrm{s}}^{2} $ ,方向水平向右,故 $ \mathrm{C} $ 错误;小球运动过程中,电场力对小球做功,所以系统机械能不守恒,故 $ \mathrm{D} $ 错误.
6.图甲是用力传感器对单摆做小角度摆动过程进行测量的装置图,图乙是与力传感器连接的计算机屏幕所显示的 $ F-t $ 图像,其中 $ F $ 的最大值 $ {F}_{ \max }=1.02\mathrm{N} $ ,已知摆球质量 $ m=100\mathrm{g} $ ,重力加速度 $ g $ 取 $ 9.8\mathrm{m}/{\mathrm{s}}^{2} $ , $ {\mathrm{\pi }}^{2} $ 取 $ 9.8 $ ,不计摆线质量及空气阻力.下列说法不正确的是( )
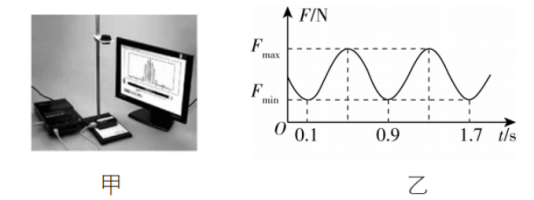
A.单摆周期为 $ 1.6\mathrm{s} $
B.单摆摆长为 $ 0.32\mathrm{m} $
C. $ F $ 的最小值 $ {F}_{ \min }=0.96\mathrm{N} $
D.若仅将摆球质量变为 $ 200\mathrm{g} $ ,单摆周期不变
答案:B
解析:根据单摆振动的规律可知,在一个周期内摆球会两次经过最低点,即摆线会出现两次拉力最大的时刻,由题图乙可知,单摆周期为 $ 1.6\mathrm{s} $ ,故 $ \mathrm{A} $ 正确;根据单摆周期公式 $ T=2\mathrm{\pi }\sqrt{\dfrac{l}{g}} $ 可得,单摆摆长 $ l=\dfrac{g{T}^{2}}{4{\mathrm{\pi }}^{2}}=0.64\mathrm{m} $ ,故 $ \mathrm{B} $ 错误;设单摆的摆角为 $ \theta $ ,当摆球摆到最高点时摆线拉力最小,为 $ {F}_{ \min }=mg \cos \theta $ ,设摆球运动至最低点时的速度大小为 $ v $ ,则根据机械能守恒定律有 $ \dfrac{1}{2}m{v}^{2}=mgl(1- \cos \theta ) $ ,在最低点时,根据牛顿第二定律有 $ {F}_{ \max }-mg=m\dfrac{{v}^{2}}{l} $ ,联立解得 $ {F}_{ \min }=0.96\mathrm{N} $ ,故 $ \mathrm{C} $ 正确;根据单摆周期公式可知,周期与摆球质量无关,所以若仅将摆球质量变为 $ 200\mathrm{g} $ ,单摆周期不变,故 $ \mathrm{D} $ 正确 $ .\mathrm{B} $ 符合题意.
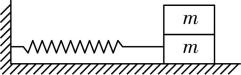
7.如图所示,将质量为 $ {m}_{A}=100\mathrm{g} $ 的物体 $ A $ 放在弹簧上端并与之连接,下端连接一质量为 $ {m}_{B}=200\mathrm{g} $ 的物体 $ B $ ,物体 $ B $ 放在地面上,形成竖直方向的弹簧振子,使 $ A $ 上下做简谐运动.弹簧原长为 $ 10\mathrm{c}\mathrm{m} $ ,劲度系数为 $ k=50\mathrm{N}/\mathrm{m} $ . $ A $ 、 $ B $ 的厚度可忽略不计, $ g $ 取 $ 10\mathrm{m}/{\mathrm{s}}^{2} $ .下列说法正确的是( )
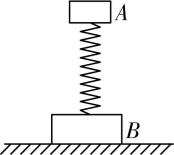
A. $ A $ 的平衡位置离地面的高度为 $ 6\mathrm{c}\mathrm{m} $
B. $ A $ 完成任意半个周期振动前后重力势能变化量都相等
C.若保持物体 $ B $ 始终在地面上,当物体 $ A $ 以最大振幅振动时,物体 $ B $ 对地面的最小压力为0
D.若保持物体 $ B $ 始终在地面上,当物体 $ A $ 以最大振幅振动时,物体 $ B $ 对地面的最大压力为 $ 3\mathrm{N} $
答案:C
解析: $ A $ 在平衡位置时,所受合力为零,设弹簧的压缩量为 $ {x}_{0} $ ,则 $ {m}_{A}g=k{x}_{0} $ ,解得 $ {x}_{0}=0.02\mathrm{m}=2\mathrm{c}\mathrm{m} $ ,则 $ A $ 的平衡位置离地面的高度 $ h=l-{x}_{0}=8\mathrm{c}\mathrm{m} $ ,故 $ \mathrm{A} $ 错误; $ A $ 完成任意半个周期振动通过的路程都为2倍的振幅,但 $ A $ 可能做往复运动,通过的位移不一定相同,根据 $ \mathrm{\Delta }{E}_{\mathrm{p}}={m}_{A}g\mathrm{\Delta }h $ 可知,重力势能变化量不一定相等,故 $ \mathrm{B} $ 错误;物体 $ A $ 放在弹簧上端并与之连接,若保持物体 $ B $ 始终在地面上,则当物体 $ A $ 以最大振幅振动时, $ A $ 在最高点时,物体 $ B $ 对地面的最小压力为0,此时对 $ B $ ,根据平衡条件可知,弹簧的弹力大小为 $ F={m}_{B}g=2\mathrm{N} $ ,此时 $ A $ 所受的合力大小为 $ {F}_{合}=F+{m}_{A}g=3\mathrm{N} $ , $ A $ 所受的合力提供回复力,根据简谐运动的对称性可知,当 $ A $ 在最低点时回复力大小也为 $ 3\mathrm{N} $ ,则此时弹簧的弹力大小为 $ F^\prime ={F}_{合}+{m}_{A}g=4\mathrm{N} $ ,对 $ B $ ,根据平衡条件可知, $ B $ 受到地面最大的支持力为 $ {F}_{\mathrm{N}}=F^\prime +{m}_{B}g=6\mathrm{N} $ ,根据牛顿第三定律可知,物体 $ B $ 对地面的最大压力为 $ {F}_{压}={F}_{\mathrm{N}}=6\mathrm{N} $ ,故 $ \mathrm{C} $ 正确, $ \mathrm{D} $ 错误.
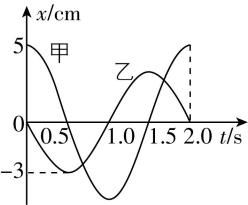
8.如图所示为同一地点的两个单摆甲、乙的振动图像, $ g=10\mathrm{m}/{\mathrm{s}}^{2} $ ,下列说法正确的是( )
 (多选)
(多选)
A.甲单摆的摆长较大
B.甲单摆的振幅比乙单摆的大
C.甲单摆的最大偏角约为 $ {2.9}^{\circ } $
D.在 $ t=0.5\mathrm{s} $ 时有正向最大加速度的是乙单摆(不考虑向心加速度)
答案:BCD
解析:由题图可知,两单摆的周期相同,同一地点重力加速度 $ g $ 相同,由单摆的周期公式 $ T=2\mathrm{\pi }\sqrt{\dfrac{l}{g}} $ 可知,甲、乙两单摆的摆长相等,故 $ \mathrm{A} $ 错误;甲单摆的振幅为 $ 5\mathrm{c}\mathrm{m} $ ,乙单摆的振幅为 $ 3\mathrm{c}\mathrm{m} $ ,则甲单摆的振幅比乙单摆的大,故 $ \mathrm{B} $ 正确;由 $ T=2\mathrm{\pi }\sqrt{\dfrac{l}{g}} $ ,解得甲单摆的摆长 $ l=\dfrac{{T}^{2}}{4{\mathrm{\pi }}^{2}}g\approx 1\mathrm{m} $ ,则甲单摆的最大偏角 $ {\theta }_{ \max }=\dfrac{A}{l}=\dfrac{0.05}{1}\mathrm{r}\mathrm{a}\mathrm{d}\approx {2.9}^{\circ } $ ,故 $ \mathrm{C} $ 正确;在 $ t=0.5\mathrm{s} $ 时,甲单摆经过平衡位置,振动的加速度为零,而乙单摆的位移为负的最大值,则乙单摆具有正向最大加速度,故 $ \mathrm{D} $ 正确.
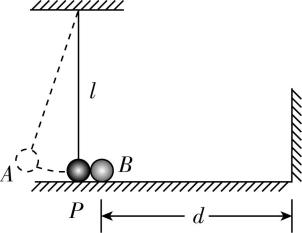
9.如图为一摆长为 $ l $ 的单摆,静止时 $ A $ 球恰与水平面接触, $ A $ 球质量为 $ m $ ,现将 $ A $ 球向左拉开一个很小的角度,使 $ A $ 球升高 $ h $ ,然后由静止释放 $ {\rm .} A $ 球摆至平衡位置 $ P $ 时,恰与静止在 $ P $ 处、质量为 $ 0.2m $ 的 $ B $ 球发生正碰,碰后 $ A $ 继续向右摆动, $ B $ 球以速度 $ v $ 沿光滑水平面向右运动,与距离为 $ d $ 的墙壁碰撞后以原速率返回,当 $ B $ 球重新回到位置 $ P $ 时, $ A $ 球恰好碰后第一次回到 $ P $ 点.两球均可视为质点,不计空气阻力,重力加速度为 $ g $ ,则下列说法正确的是( )
 (多选)
(多选)
A.单摆的周期为 $ T=\dfrac{4d}{v} $
B.当地的重力加速度大小为 $ \dfrac{l{\mathrm{\pi }}^{2}{v}^{2}}{4{d}^{2}} $
C. $ A $ 球释放后到达 $ P $ 点经历的时间小于 $ A $ 球碰后再次到达最高点的时间
D. $ A $ 球碰后的速度大小为 $ {v}_{A}=\sqrt{2gh}-\dfrac{v}{5} $
答案:ABD
解析: $ B $ 球从发生碰撞到重新回到 $ P $ 点运动的总时间为 $ t=\dfrac{2d}{v} $ ,根据题意可知,单摆的周期为 $ T=2t=\dfrac{4d}{v} $ ,故 $ \mathrm{A} $ 正确;根据单摆的周期公式有 $ \dfrac{4d}{v}=2\mathrm{\pi }\sqrt{\dfrac{l}{g}} $ ,解得重力加速度大小为 $ g=\dfrac{l{\mathrm{\pi }}^{2}{v}^{2}}{4{d}^{2}} $ ,故 $ \mathrm{B} $ 正确;单摆的周期为 $ T=2\mathrm{\pi }\sqrt{\dfrac{l}{g}} $ ,可知 $ A $ 球碰撞前后周期不变,故 $ A $ 球释放后到达 $ P $ 点经历的时间等于 $ A $ 球碰后再次到达最高点的时间,故 $ \mathrm{C} $ 错误;根据动能定理得 $ mgh=\dfrac{1}{2}m{v}_{0}^{2} $ ,根据碰撞过程中动量守恒有 $ m{v}_{0}=m{v}_{A}+0.2mv $ ,联立解得 $ {v}_{A}=\sqrt{2gh}-\dfrac{v}{5} $ ,故 $ \mathrm{D} $ 正确.
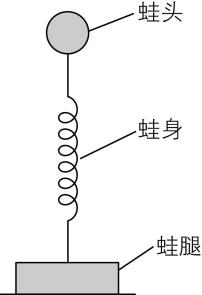
10.由蛙头、蛙身、蛙腿组成的“跳跳蛙”玩具,其结构可简化为如图所示的模型.已知蛙头静止时弹簧的压缩量为 $ {x}_{0} $ ,现用外力向下压蛙头,使弹簧的压缩量为 $ 3{x}_{0} $ ,由静止释放蛙头.设在蛙头运动过程中蛙腿未离开地面,弹簧始终在弹性限度内,不计一切阻力.则关于蛙头向上运动阶段,下列说法正确的是( )
 (多选)
(多选)
A.释放蛙头后其上升的最大高度为 $ 4{x}_{0} $
B.蛙头到达最高点时的加速度为0
C.蛙头从弹簧压缩量为 $ 3{x}_{0} $ 到恢复原长的运动时间是从弹簧恢复原长到到达最高点的3倍
D.蛙头从弹簧压缩量为 $ 3{x}_{0} $ 到 $ {x}_{0} $ 的运动时间是从弹簧压缩量为 $ {x}_{0} $ 到恢复原长的3倍
答案:AD
解析:由题知,蛙头在平衡位置时弹簧的压缩量为 $ {x}_{0} $ ,故蛙头到达的最低点到平衡位置的距离为 $ 3{x}_{0}-{x}_{0}=2{x}_{0} $ ,蛙头做简谐运动,根据简谐运动对称性,可知蛙头到达的最高点到平衡位置的距离也为 $ 2{x}_{0} $ ,所以蛙头释放后其上升的最大高度为 $ 4{x}_{0} $ ,故 $ \mathrm{A} $ 正确;根据对称性,蛙头到达最高点时的加速度最大,速度为零,故 $ \mathrm{B} $ 错误;以平衡位置为坐标原点,设蛙头做简谐运动的振动方程为 $ x=2{x}_{0} \sin (\dfrac{2\mathrm{\pi }}{T}t+\varphi ) $ ,当 $ t=0 $ 时位移为 $ -2{x}_{0} $ ,则有 $ -2{x}_{0}=2{x}_{0} \sin (\dfrac{2\mathrm{\pi }}{T}×0+\varphi ) $ ,解得 $ \varphi =-\dfrac{\mathrm{\pi }}{2} $ ,则蛙头做简谐运动的振动方程为 $ x=2{x}_{0} \sin (\dfrac{2\mathrm{\pi }}{T}t-\dfrac{\mathrm{\pi }}{2}) $ ,弹簧恢复原长时的位移 $ {x}_{1}={x}_{0} $ ,代入方程有 $ {x}_{0}=2{x}_{0} \sin (\dfrac{2\mathrm{\pi }}{T}{t}_{1}-\dfrac{\mathrm{\pi }}{2}) $ ,解得 $ {t}_{1}=\dfrac{1}{3}T $ ,蛙头到达最高点时的位移 $ {x}_{2}=2{x}_{0} $ ,代入方程有 $ 2{x}_{0}=2{x}_{0} \sin (\dfrac{2\mathrm{\pi }}{T}{t}_{2}-\dfrac{\mathrm{\pi }}{2}) $ ,解得 $ {t}_{2}=\dfrac{1}{2}T $ ,蛙头从弹簧压缩量为 $ 3{x}_{0} $ 到恢复原长的运动时间与从弹簧恢复原长到到达最高点的运动时间之比为 $ \dfrac{{t}_{1}}{{t}_{2}-{t}_{1}}=\dfrac{\dfrac{1}{3}T}{\dfrac{1}{2}T-\dfrac{1}{3}T}=\dfrac{2}{1} $ ,故 $ \mathrm{C} $ 错误;弹簧压缩量为 $ {x}_{0} $ 时蛙头的位移为 $ {x}_{3}=0 $ ,代入方程有 $ 0=2{x}_{0} \sin (\dfrac{2\mathrm{\pi }}{T}{t}_{3}-\dfrac{\mathrm{\pi }}{2}) $ ,解得 $ {t}_{3}=\dfrac{1}{4}T $ ,蛙头从弹簧压缩量为 $ 3{x}_{0} $ 到 $ {x}_{0} $ 的运动时间与从弹簧压缩量为 $ {x}_{0} $ 到恢复原长的运动时间之比为 $ \dfrac{{t}_{3}}{{t}_{1}-{t}_{3}}=\dfrac{\dfrac{1}{4}T}{\dfrac{1}{3}T-\dfrac{1}{4}T}=\dfrac{3}{1} $ ,故 $ \mathrm{D} $ 正确.
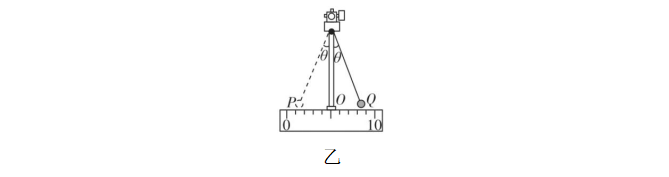
11.某同学在做“用单摆测定重力加速度”的实验.
(1) 该同学用游标卡尺测量摆球的直径时示数如图甲所示,则摆球的直径 $ D= $ $ \mathrm{m} $ ,把摆球用细线悬挂在铁架台上,用毫米刻度尺测得摆线长为 $ l $ .

(2) 实验装置的示意图如图乙所示, $ P $ 、 $ Q $ 分别为摆球在运动过程中左、右侧能到达的最高点, $ O $ 为平衡位置,则应该从摆球经过 (填“ $ O $ ”“ $ P $ ”或“ $ Q $ ”)点时开始计时,该同学用停表记下单摆做 $ n $ 次全振动的时间为 $ t $ .
(3) 该同学通过计算测得的数据,发现他得到的重力加速度的数值偏大,其原因可能是 .
A.单摆的振幅较小
B.单摆的悬点未固定紧,振动中出现松动,使摆线变长了
C.把单摆 $ n $ 次摆动的时间误记为 $ (n+1) $ 次摆动的时间
D.以摆线长 $ l $ 作为摆长进行计算
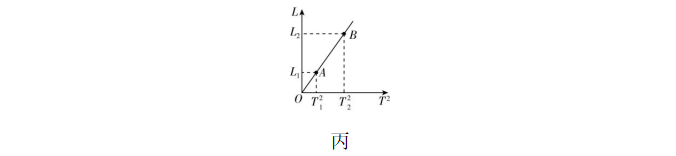
(4) 该同学改进了处理数据的方法,他测量了5组摆长 $ L $ (摆线长 $ l $ 与摆球半径之和)和对应的周期 $ T $ ,画出 $ L-{T}^{2} $ 图像,然后在图线上选取 $ A $ 、 $ B $ 两个点, $ L-{T}^{2} $ 图像如图丙所示,则当地重力加速度的表达式为 $ g= $ .(用图丙中涉及的物理量符号表示)
答案:(1) $ 8.10×{10}^{-3} $
(2) $ O $
(3) C
(4) $ \dfrac{4{\mathrm{\pi }}^{2}({L}_{2}-{L}_{1})}{{T}_{2}^{2}-{T}_{1}^{2}} $
解析:(1) 游标卡尺的主尺读数为 $ 8\mathrm{m}\mathrm{m} $ ,游标尺读数为 $ 0.05×2\mathrm{m}\mathrm{m}=0.10\mathrm{m}\mathrm{m} $ ,则 $ D=8.10\mathrm{m}\mathrm{m}=8.10×{10}^{-3}\mathrm{m} $ .
(2) 摆球在 $ O $ 点时速度最大,经过 $ O $ 点的时间最短,测量误差较小,因此应从摆球经过最低点 $ O $ 时开始计时.
(3) 根据单摆周期公式 $ T=2\mathrm{\pi }\sqrt{\dfrac{L}{g}} $ 可得 $ g=\dfrac{4{\mathrm{\pi }}^{2}L}{{T}^{2}} $ .该式只有当摆动的最大角度小于 $ {5}^{\circ } $ 时才成立,所以单摆的振幅较小,不影响重力加速度的测量,故 $ \mathrm{A} $ 错误;若单摆的悬点未固定紧,振动中出现松动,使摆线变长了,则摆长的测量值偏小,重力加速度的测量值将偏小,故 $ \mathrm{B} $ 错误;若把 $ n $ 次摆动的时间误记为 $ (n+1) $ 次摆动的时间,则周期的测量值偏小,重力加速度的测量值将偏大,故 $ \mathrm{C} $ 正确;若以摆线长 $ l $ 作为摆长来计算,则摆长的测量值偏小,重力加速度测量值将偏小,故 $ \mathrm{D} $ 错误.
(4) 根据单摆的周期公式 $ T=2\mathrm{\pi }\sqrt{\dfrac{L}{g}} $ ,整理可得 $ L=\dfrac{g}{4{\mathrm{\pi }}^{2}}{T}^{2} $ ,即 $ L-{T}^{2} $ 图线斜率为 $ \dfrac{g}{4{\mathrm{\pi }}^{2}} $ ,则有 $ \dfrac{g}{4{\mathrm{\pi }}^{2}}=\dfrac{{L}_{2}-{L}_{1}}{{T}_{2}^{2}-{T}_{1}^{2}} $ ,解得 $ g=\dfrac{4{\mathrm{\pi }}^{2}({L}_{2}-{L}_{1})}{{T}_{2}^{2}-{T}_{1}^{2}} $ .
12.一水平弹簧振子做简谐运动,其位移和时间关系如图所示.
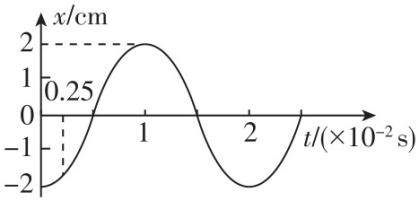
(1) 写出这个简谐运动的位移随时间变化的关系式.(用正弦函数表示)
(2) 从 $ t=0 $ 到 $ t=6.5×{10}^{-2}\mathrm{s} $ 的时间内,振子通过的路程为多大?
(3) 当 $ t=0.25×{10}^{-2}\mathrm{s} $ 时,振子的位移是多少?
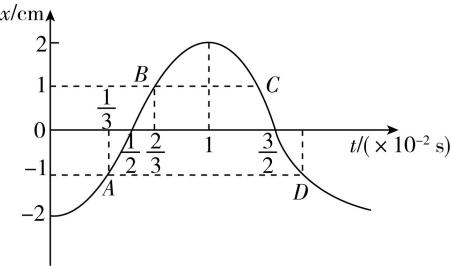
(4) 振子从 $ -1\mathrm{c}\mathrm{m} $ 振动到 $ 1\mathrm{c}\mathrm{m} $ 经历的时间为多长?
答案:(1) $ x=2 \sin (100\mathrm{\pi }t-\dfrac{\mathrm{\pi }}{2})\mathrm{c}\mathrm{m} $
(2) $ 26\mathrm{c}\mathrm{m} $
(3) $ -\sqrt{2}\mathrm{c}\mathrm{m} $
(4) $ (\dfrac{1}{3}+2n)×{10}^{-2}\mathrm{s} $ 或 $ (1+2n)×{10}^{-2}\mathrm{s} $ 或 $ (\dfrac{5}{3}+2n)×{10}^{-2}\mathrm{s}(n=0,1,2,\cdots ) $
解析:(1) 由题图可知 $ T=2×{10}^{-2}\mathrm{s} $ , $ A=2\mathrm{c}\mathrm{m} $ ,则 $ \omega =\dfrac{2\mathrm{\pi }}{T}=100\mathrm{\pi }\mathrm{r}\mathrm{a}\mathrm{d}/\mathrm{s} $ , $ t=0 $ 时, $ x=A \sin \varphi =-A $ ,得 $ \varphi =-\dfrac{\mathrm{\pi }}{2} $ ,简谐运动的位移随时间变化的关系式为 $ x=2 \sin (100\mathrm{\pi }t-\dfrac{\mathrm{\pi }}{2})\mathrm{c}\mathrm{m} $ .
(2) 从 $ t=0 $ 到 $ t=6.5×{10}^{-2}\mathrm{s} $ 时间内, $ \mathrm{\Delta }t=6.5×{10}^{-2}\mathrm{s}=\dfrac{13}{4}T $ ,一个周期内振子通过的路程为 $ 4A $ ,振子从最大位移处开始的 $ \dfrac{T}{4} $ 时间内的路程为 $ A $ ,所以通过的路程 $ s=\dfrac{13}{4}×4A=13A=26\mathrm{c}\mathrm{m} $ .
(3) 根据简谐运动的表达式 $ x=2 \sin (100\mathrm{\pi }t-\dfrac{\mathrm{\pi }}{2})\mathrm{c}\mathrm{m} $ ,将 $ t=0.25×{10}^{-2}\mathrm{s} $ 代入,可得 $ t=0.25×{10}^{-2}\mathrm{s} $ 时,振子的位移 $ x^\prime =2 \sin (100\mathrm{\pi }×0.25×{10}^{-2}-\dfrac{\mathrm{\pi }}{2})\mathrm{c}\mathrm{m}=-\sqrt{2}\mathrm{c}\mathrm{m} $ .
(4) 如图所示,分析第一个周期内,将 $ x=-1\mathrm{c}\mathrm{m} $ 代入,有 $ -1\mathrm{c}\mathrm{m}=2 \sin (100\mathrm{\pi }t-\dfrac{\mathrm{\pi }}{2})\mathrm{c}\mathrm{m} $ ,解得 $ t=\dfrac{1}{3}×{10}^{-2}\mathrm{s} $ 或 $ t=\dfrac{5}{3}×{10}^{-2}\mathrm{s} $ ,
由 $ A\to B. $ ,有 $ {t}_{1}=2×(\dfrac{1}{2}-\dfrac{1}{3})×{10}^{-2}\mathrm{s}=\dfrac{1}{3}×{10}^{-2}\mathrm{s} $ ,
由 $ A\to C. $ ,有 $ {t}_{2}=\dfrac{T}{2}=1×{10}^{-2}\mathrm{s} $ ,
同理,若由 $ D $ 开始运动,有 $ {t}_{3}=1×{10}^{-2}\mathrm{s} $ , $ {t}_{4}=\dfrac{5}{3}×{10}^{-2}\mathrm{s} $ ,
根据周期性可知,振子从 $ -1\mathrm{c}\mathrm{m} $ 振动到 $ 1\mathrm{c}\mathrm{m} $ ,经历的时间为 $ t=nT+\dfrac{1}{3}×{10}^{-2}\mathrm{s}=(\dfrac{1}{3}+2n)×{10}^{-2}\mathrm{s} $ 或 $ t=nT+1×{10}^{-2}\mathrm{s}=(1+2n)×{10}^{-2}\mathrm{s} $ 或 $ t=nT+\dfrac{5}{3}×{10}^{-2}\mathrm{s}=(\dfrac{5}{3}+2n)×{10}^{-2}\mathrm{s}(n=0,1,2,\cdots ) $ .
13.如图所示,质量为 $ 2m $ 的物块 $ A $ 与质量为 $ m $ 的物块 $ B $ 用轻质弹簧相连,静置在底部有挡板的倾角 $ \theta ={30}^{\circ } $ 的光滑斜面上,现将另一质量为 $ m $ 的物块 $ C $ 从物块 $ B $ 上方由静止释放,释放时物块 $ C $ 与物块 $ B $ 之间的距离为 $ L $ ,释放后物块 $ C $ 沿斜面下滑,与物块 $ B $ 碰撞后粘在一起并记为物块 $ D $ ,物块 $ D $ 继续向下压缩弹簧,此后物块 $ D $ 在斜面上做简谐运动,最低点为 $ E $ (图中未标出).已知弹簧的劲度系数为 $ k $ ,弹簧的弹性势能 $ {E}_{\mathrm{p}} $ 与形变量 $ \mathrm{\Delta }x $ 的关系为 $ {E}_{\mathrm{p}}=\dfrac{1}{2}k{\left(\mathrm{\Delta }x\right) ^ {2}} $ ,重力加速度为 $ g $ .
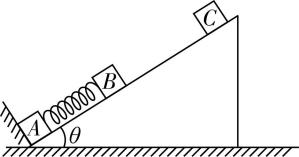
(1) 求物块 $ B $ 与物块 $ C $ 碰前弹簧的形变量;
(2) 求物块 $ D $ 运动过程中速度的最大值;
(3) 若从弹簧被压缩到最短时开始计时, $ {t}_{0} $ 时刻物块 $ D $ 第一次运动到最高点,此时物块 $ A $ 恰好不离开挡板,求物块 $ D $ 与 $ E $ 点的距离为 $ \dfrac{mg}{k} $ 的时刻.
答案:(1) $ \dfrac{mg}{2k} $
(2) $ \sqrt{\dfrac{m{g}^{2}}{8k}+\dfrac{gL}{4}} $
(3) $ 2n{t}_{0}+\dfrac{{t}_{0}}{3}(n=0,1,2,\cdots ) $ 或 $ 2n{t}_{0}+\dfrac{5{t}_{0}}{3}(n=0,1,2,\cdots ) $
解析:(1) 刚开始物块 $ B $ 处于静止状态,沿斜面方向有 $ mg \sin \theta =k\mathrm{\Delta }{x}_{1} $ ,解得 $ \mathrm{\Delta }{x}_{1}=\dfrac{mg}{2k} $ .
(2) 设物块 $ C $ 与物块 $ B $ 碰撞前瞬间的速度为 $ {v}_{0} $ ,从开始释放 $ C $ 到与 $ B $ 碰撞前,由动能定理有 $ mgL \sin \theta =\dfrac{1}{2}m{v}_{0}^{2} $ ,
设碰后物块 $ D $ 的速度为 $ {v}_{1} $ ,由动量守恒定律有 $ m{v}_{0}=2m{v}_{1} $ ,
物块 $ D $ 做简谐运动,处于平衡位置时速度最大,设平衡位置处弹簧的形变量为 $ \mathrm{\Delta }{x}_{2} $ ,受力分析可知 $ k\mathrm{\Delta }{x}_{2}=2mg \sin \theta $ ,
碰后物块 $ D $ 运动到平衡位置的过程中,由动能定理有 $ 2mg \sin \theta (\mathrm{\Delta }{x}_{2}-\mathrm{\Delta }{x}_{1})-{W}_{弹}=\dfrac{1}{2}×2m{v}_{ \max }^{2}-\dfrac{1}{2}×2m{v}_{1}^{2} $ ,
克服弹力做的功 $ {W}_{弹}=\dfrac{1}{2}k{\left(\mathrm{\Delta }{x}_{2}\right) ^ {2}}-\dfrac{1}{2}k{\left(\mathrm{\Delta }{x}_{1}\right) ^ {2}} $ ,
解得 $ {v}_{ \max }=\sqrt{\dfrac{m{g}^{2}}{8k}+\dfrac{gL}{4}} $ .
(3) 物块 $ D $ 运动到最高点时,物块 $ A $ 恰好不离开挡板,此时弹簧的形变量 $ \mathrm{\Delta }{x}_{3}=\dfrac{2mg \sin \theta }{k}=\dfrac{mg}{k} $ ,
故物块 $ D $ 做简谐运动的振幅 $ A=\mathrm{\Delta }{x}_{2}+\mathrm{\Delta }{x}_{3}=\dfrac{2mg}{k} $ ,
以平衡位置为坐标原点,以沿斜面向下为 $ x $ 轴正方向,则简谐运动的方程为 $ x=\dfrac{2mg}{k} \sin (\dfrac{\mathrm{\pi }}{{t}_{0}}t+\dfrac{\mathrm{\pi }}{2}) $ ,
则第一次 $ x=\dfrac{mg}{k} $ 时, $ {t}_{1}=\dfrac{{t}_{0}}{3} $ ,
第二次 $ x=\dfrac{mg}{k} $ 时, $ {t}_{2}=\dfrac{5{t}_{0}}{3} $ ,
考虑到简谐运动的周期性,则有 $ t=2n{t}_{0}+\dfrac{{t}_{0}}{3}(n=0,1,2,\cdots ) $ 或 $ t=2n{t}_{0}+\dfrac{5{t}_{0}}{3}(n=0,1,2,\cdots ) $ .
14.如图所示,一根粗细均匀的木筷,下端绕几根铁丝,竖直浮在盛水的盆中.筷子与铁丝的总质量为 $ m $ ,筷子的直径远小于盆的直径.把木筷向上提起一段距离后放手,木筷就在水中上下振动,振幅为 $ A $ .不考虑水对筷子的阻力,忽略铁丝体积的影响,木筷始终有一部分露在水面上.
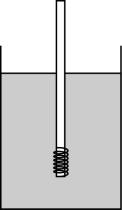
(1) 证明:木筷在水中做简谐运动.
(2) 某同学发现木筷与铁丝在最高点的机械能大于它们在最低点的机械能.他分析之后认为,木筷与铁丝损失的机械能应转化为了水的重力势能,请判断他的结论是否正确,并说明理由.
(3) 证明木筷与铁丝的最大动能 $ {E}_{\mathrm{k}\mathrm{m}}\propto {A}^{2} $ .
答案:(1) 见解析
(2) 结论正确,理由见解析
(3) 见解析
解析:(1) 设木筷的横截面积为 $ S $ ,水的密度为 $ \rho $ ,木筷静止时水下长度为 $ {x}_{0} $ ,根据平衡条件有 $ \rho gS{x}_{0}=mg $ ,把木筷向上提起一段距离后放手,以向上为正方向,设木筷底部在水下相对于平衡位置的距离为 $ x $ ,则木筷受到的合力为 $ {F}_{合}=\rho gS({x}_{0}-x)-mg $ ,解得 $ {F}_{合}=-\rho gSx=-kx $ ,可知木筷在水中做简谐运动.
(2) 某同学发现木筷与铁丝在最高点的机械能大于它们在最低点的机械能.他分析之后认为,木筷与铁丝损失的机械能应转化为了水的重力势能,他的结论是正确的.当木筷与铁丝在最高点时,木筷在水下长度最小,排开水的体积最小,盆中水面高度最低,水的重力势能较小;当木筷与铁丝在最低点时,木筷在水下长度最大,排开水的体积最大,盆中水面高度最高,水的重力势能较大,故木筷与铁丝从最高点到最低点过程,水的重力势能增大,木筷与铁丝的机械能减小,则木筷与铁丝在最高点的机械能大于它们在最低点的机械能.
(3) 由于木筷在水中做简谐运动,有 $ {F}_{合}=-kx $ ,木筷与铁丝在最高点时速度为0,在平衡位置时速度最大,动能最大,从最高点到平衡位置,合力做的功为 $ W=\dfrac{kA+0}{2}\cdot A=\dfrac{1}{2}k{A}^{2} $ ,
根据动能定理可得 $ W={E}_{\mathrm{k}\mathrm{m}}-0 $ ,
联立可得 $ {E}_{\mathrm{k}\mathrm{m}}=\dfrac{1}{2}k{A}^{2}\propto {A}^{2} $ .